A Harbor with Complex Resources and Conditions
The fourth C tutorial models a harbor with ships, tugs, berths, wind, tide, and
conditions for safe docking. The central feature is the same in Python:
cimba.Condition lets a process wait until an arbitrary Python predicate
becomes true.
An Empty Simulation Template
The C tutorial begins with an empty shell. Python’s equivalent is simply a simulation context with a stop event:
import cimba
def run_template(duration: float = 10.0, seed: int = 40) -> dict[str, float | int]:
with cimba.Simulation(start_time=0.0, seed=seed) as sim:
sim.stop_at(duration, priority=-100)
sim.execute()
return {"seed": sim.seed_used, "now": sim.now, "event_count": sim.event_count}
def main() -> None:
print(run_template())
if __name__ == "__main__":
main()
Processes, Resources, and Conditions
The simulated harbor state can be an ordinary dictionary. Tugs and berths are resource pools, the communications channel is a binary resource, and the harbormaster is a condition:
ctx = {
"env": {"wind_magnitude": 20.0, "water_depth": 5.0},
"tugs": cimba.ResourcePool("Tugs", capacity=2),
"berths": [
cimba.ResourcePool("Small berth", 1),
cimba.ResourcePool("Large berth", 1),
],
"comms": cimba.Resource("Comms"),
"harbormaster": cimba.Condition("Harbormaster"),
"departed": cimba.ObjectQueue("Departed ships"),
"time_in_system": [cimba.Dataset(), cimba.Dataset()],
"ship_by_process": {},
}
ctx["harbormaster"].subscribe(ctx["tugs"], *ctx["berths"])
Building Our Ships
The C tutorial derives struct ship from cmb_process. Python keeps ship
characteristics in normal objects or dictionaries and maps a process object to
its ship data:
ship = {
"size": SMALL,
"tugs_needed": 1,
"max_wind": 10.0,
"min_depth": 8.0,
"unloading_time": 2.0,
}
proc = cimba.Process("Ship_000001_small", ship_proc, ctx, pass_process=True)
ctx["ship_by_process"][proc] = ship
proc.start()
pass_process=True is used here because the ship target needs the
cimba.Process object as a key into ship_by_process.
Weather and Tides
In the full C tutorial, weather and tide are separate processes that update the environment and signal the harbormaster. The checked-in compact Python tutorial uses fixed values so the tests stay deterministic, but the C-like stochastic version uses the current Python distribution functions directly:
def weather_and_tide(ctx):
while True:
old_wind = ctx["env"]["wind_magnitude"]
ctx["env"]["wind_magnitude"] = 0.5 * cimba.rayleigh(5.0) + 0.5 * old_wind
ctx["env"]["wind_direction"] = cimba.pert(0.0, 225.0, 360.0)
astronomical_tide = ctx["tide_model"].depth_at(cimba.time())
weather_tide = 0.1 * ctx["env"]["wind_magnitude"]
ctx["env"]["water_depth"] = astronomical_tide + weather_tide
ctx["harbormaster"].signal()
cimba.hold(1.0)
cimba.rayleigh(s) takes the Rayleigh scale parameter. cimba.pert(min,
mode, max) is the lowercase Python wrapper for Cimba’s PERT distribution.
The general rule is the same as in C: whenever model state changes in a way that could make a waiting condition true, signal the condition.
Resources and Condition Variables
A condition predicate receives the waiting process and the context object. It
must inspect state and return True or False:
def is_ready_to_dock(process, ctx):
ship = ctx["ship_by_process"][process]
return (
ctx["env"]["water_depth"] >= ship["min_depth"]
and ctx["env"]["wind_magnitude"] <= ship["max_wind"]
and ctx["tugs"].available >= ship["tugs_needed"]
and ctx["berths"][ship["size"]].available >= 1
)
As in the C tutorial, a waiting process should re-check the predicate after it wakes. Another process may have consumed the relevant resources first:
while not is_ready_to_dock(me, ctx):
assert ctx["harbormaster"].wait(is_ready_to_dock, ctx) == cimba.SUCCESS
The C tutorial uses native resource-guard observer registration so releases from
tugs and berths automatically forward a signal to the harbormaster. Python
exposes this as cimba.Condition.subscribe():
ctx["harbormaster"].subscribe(ctx["tugs"], *ctx["berths"])
Use explicit condition.signal() for model state that is not represented by a
Cimba resource guard, such as weather and tide changes.
The Life of a Ship
Once a ship is cleared, it acquires berth and tug resources, uses the communications resource, docks, unloads, acquires tugs again, leaves, and puts a departure record into an object queue:
def ship_proc(me, ctx):
ship = ctx["ship_by_process"][me]
t_arrival = cimba.time()
while not is_ready_to_dock(me, ctx):
assert ctx["harbormaster"].wait(is_ready_to_dock, ctx) == cimba.SUCCESS
berth = ctx["berths"][ship["size"]]
assert berth.acquire(1) == cimba.SUCCESS
assert ctx["tugs"].acquire(ship["tugs_needed"]) == cimba.SUCCESS
assert ctx["comms"].acquire() == cimba.SUCCESS
cimba.hold(cimba.gamma(5.0, 0.01))
ctx["comms"].release()
cimba.hold(cimba.pert(0.4, 0.5, 0.8))
ctx["tugs"].release(ship["tugs_needed"])
avg = ship["unloading_time"]
cimba.hold(cimba.pert(0.75 * avg, avg, 2.0 * avg))
assert ctx["tugs"].acquire(ship["tugs_needed"]) == cimba.SUCCESS
assert ctx["comms"].acquire() == cimba.SUCCESS
cimba.hold(cimba.gamma(5.0, 0.01))
ctx["comms"].release()
cimba.hold(cimba.pert(0.4, 0.5, 0.8))
berth.release(1)
ctx["tugs"].release(ship["tugs_needed"])
system_time = cimba.time() - t_arrival
ctx["departed"].put((me.name, ship["size"], system_time))
return system_time
Because the harbormaster condition subscribed to the tug and berth resource
guards during setup, these releases are forwarded in C; the ship process does
not need a Python-level harbormaster.signal() call.
A separate departure process consumes those records and collects statistics in
cimba.Dataset objects. This is the Python equivalent of the C tutorial’s
departure process reclaiming ship objects and reading process exit values.
Running a Trial
The complete compact trial is:
import cimba
SMALL = 0
LARGE = 1
def is_ready_to_dock(process, ctx):
ship = ctx["ship_by_process"][process]
return (
ctx["env"]["water_depth"] >= ship["min_depth"]
and ctx["env"]["wind_magnitude"] <= ship["max_wind"]
and ctx["tugs"].available >= ship["tugs_needed"]
and ctx["berths"][ship["size"]].available >= 1
)
def ship_proc(me, ctx):
ship = ctx["ship_by_process"][me]
t_arrival = cimba.time()
while not is_ready_to_dock(me, ctx):
assert ctx["harbormaster"].wait(is_ready_to_dock, ctx) == cimba.SUCCESS
berth = ctx["berths"][ship["size"]]
assert berth.acquire(1) == cimba.SUCCESS
assert ctx["tugs"].acquire(ship["tugs_needed"]) == cimba.SUCCESS
assert ctx["comms"].acquire() == cimba.SUCCESS
cimba.hold(0.05)
ctx["comms"].release()
cimba.hold(0.5)
ctx["tugs"].release(ship["tugs_needed"])
cimba.hold(ship["unloading_time"])
assert ctx["tugs"].acquire(ship["tugs_needed"]) == cimba.SUCCESS
assert ctx["comms"].acquire() == cimba.SUCCESS
cimba.hold(0.05)
ctx["comms"].release()
cimba.hold(0.5)
berth.release(1)
ctx["tugs"].release(ship["tugs_needed"])
system_time = cimba.time() - t_arrival
ctx["departed"].put((me.name, ship["size"], system_time))
return system_time
def departure_proc(ctx):
while True:
sig, departed = ctx["departed"].get()
assert sig == cimba.SUCCESS
_name, size, system_time = departed
ctx["time_in_system"][size].add(system_time)
def run_harbor_trial(seed: int = 41) -> dict[str, object]:
def weather_and_tide(ctx):
cimba.hold(1.0)
ctx["env"]["wind_magnitude"] = 4.0
ctx["env"]["water_depth"] = 12.0
assert ctx["harbormaster"].signal() == 1
with cimba.Simulation(seed=seed) as sim:
ctx = {
"env": {"wind_magnitude": 20.0, "water_depth": 5.0},
"tugs": cimba.ResourcePool("Tugs", capacity=2),
"berths": [cimba.ResourcePool("Small berth", 1), cimba.ResourcePool("Large berth", 1)],
"comms": cimba.Resource("Comms"),
"harbormaster": cimba.Condition("Harbormaster"),
"departed": cimba.ObjectQueue("Departed ships"),
"time_in_system": [cimba.Dataset(), cimba.Dataset()],
"ship_by_process": {},
}
ctx["harbormaster"].subscribe(ctx["tugs"], *ctx["berths"])
ship = {
"size": SMALL,
"tugs_needed": 1,
"max_wind": 10.0,
"min_depth": 8.0,
"unloading_time": 2.0,
}
proc = cimba.Process("Ship_000001_small", ship_proc, ctx, pass_process=True)
ctx["ship_by_process"][proc] = ship
proc.start()
cimba.Process("Departures", departure_proc, ctx).start()
cimba.Process("WeatherDepth", weather_and_tide, ctx).start()
sim.execute()
return {
"small_system_times": ctx["time_in_system"][SMALL].values(),
"large_system_times": ctx["time_in_system"][LARGE].values(),
"tugs_available": ctx["tugs"].available,
"small_berths_available": ctx["berths"][SMALL].available,
}
def main() -> None:
print(run_harbor_trial())
if __name__ == "__main__":
main()
Turning Up the Power
The C tutorial turns the harbor into a 600-trial experiment over dredging depth, tugs, berth counts, traffic levels, and replications. The Python tutorial keeps a small scenario comparison:
import cimba
from tutorial.tut_4_1 import LARGE, departure_proc, ship_proc
def run_two_large_ship_scenario(num_large_berths: int, seed: int = 42) -> float:
with cimba.Simulation(seed=seed) as sim:
ctx = {
"env": {"wind_magnitude": 4.0, "water_depth": 20.0},
"tugs": cimba.ResourcePool("Tugs", capacity=6),
"berths": [
cimba.ResourcePool("Small berth", 1),
cimba.ResourcePool("Large berth", num_large_berths),
],
"comms": cimba.Resource("Comms"),
"harbormaster": cimba.Condition("Harbormaster"),
"departed": cimba.ObjectQueue("Departed ships"),
"time_in_system": [cimba.Dataset(), cimba.Dataset()],
"ship_by_process": {},
}
ctx["harbormaster"].subscribe(ctx["tugs"], *ctx["berths"])
for idx in range(2):
ship = {
"size": LARGE,
"tugs_needed": 3,
"max_wind": 12.0,
"min_depth": 13.0,
"unloading_time": 2.0,
}
proc = cimba.Process(f"Ship_{idx:06d}_large", ship_proc, ctx, pass_process=True)
ctx["ship_by_process"][proc] = ship
proc.start()
cimba.Process("Departures", departure_proc, ctx).start()
sim.execute()
return max(ctx["time_in_system"][LARGE].values())
def run_scenarios() -> dict[str, float]:
return {
"one_large_berth": run_two_large_ship_scenario(1),
"two_large_berths": run_two_large_ship_scenario(2),
}
def main() -> None:
print(run_scenarios())
if __name__ == "__main__":
main()
A larger Python version would put each scenario/replication in a trial grid and
call cimba.run_experiment(), exactly like the M/M/1 tutorial.
The upstream C tutorial uses that larger sweep to produce a scenario chart. The
same Python statistics path is: collect each ship’s time in system in
cimba.Dataset, summarize replications with cimba.DataSummary,
then plot the resulting rows:
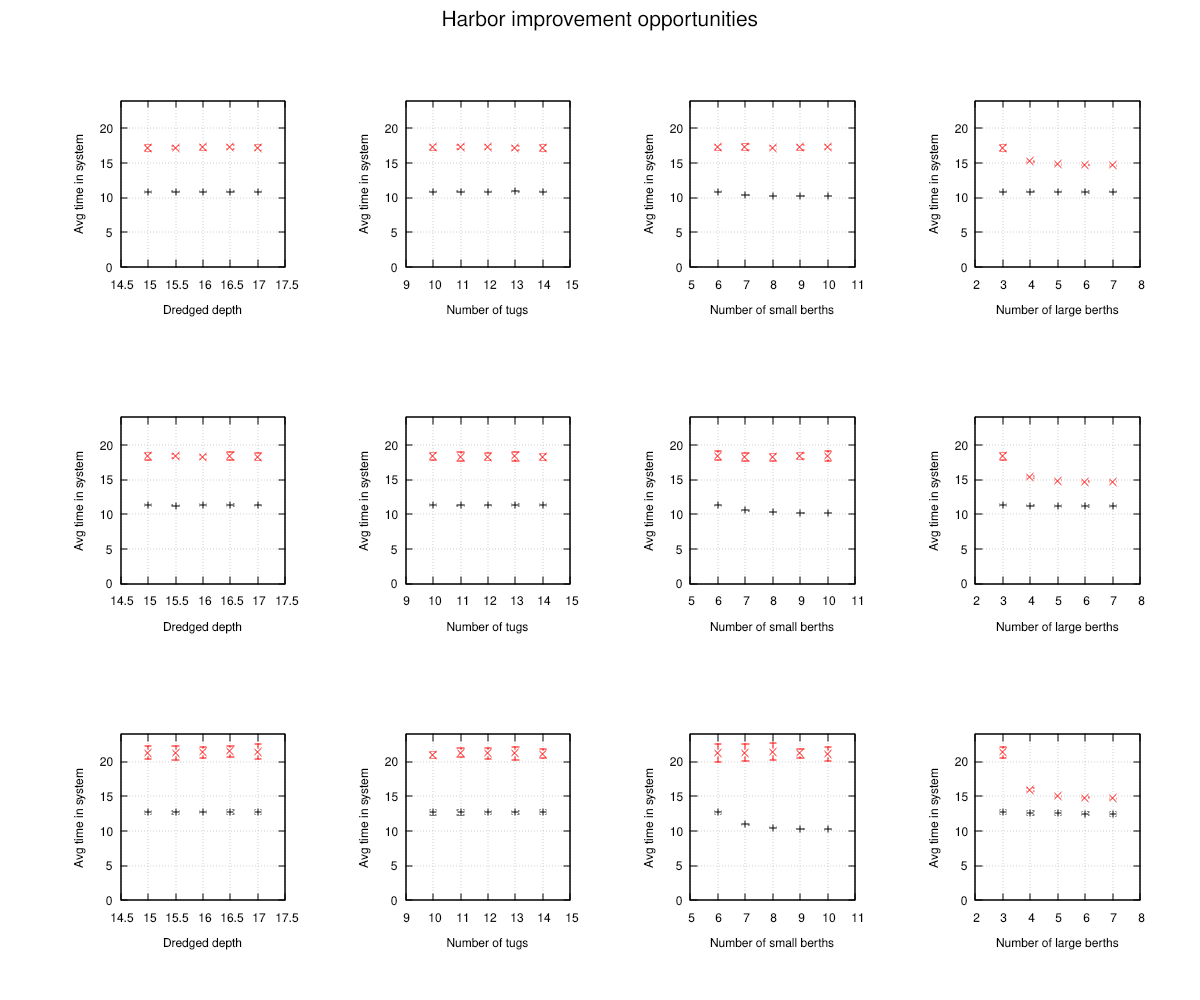
Average time in system for the harbor scenarios, with confidence intervals across replications.